The Problem of Scaling 3D Environments in Embodied AI
Creating life like and precisely scaled 3D environments is crucial for coaching and evaluating embodied AI. Nonetheless, present strategies nonetheless depend on manually designed 3D graphics, that are expensive and lack realism, thereby limiting scalability and generalization. Not like internet-scale knowledge utilized in fashions like GPT and CLIP, embodied AI knowledge is pricey, context-specific, and tough to reuse. Reaching general-purpose intelligence in bodily settings requires life like simulations, reinforcement studying, and various 3D belongings. Whereas latest diffusion fashions and 3D technology strategies present promise, many nonetheless lack key options corresponding to bodily accuracy, watertight geometry, and proper scale, making them insufficient for robotic coaching environments.
Limitations of Present 3D Technology Methods
3D object technology sometimes follows three most important approaches: feedforward technology for quick outcomes, optimization-based strategies for top of the range, and look at reconstruction from a number of photos. Whereas latest strategies have improved realism by separating geometry and texture creation, many fashions nonetheless prioritize visible look over real-world physics. This makes them much less appropriate for simulations that require correct scaling and watertight geometry. For 3D scenes, panoramic strategies have enabled full-view rendering, however they nonetheless lack interactivity. Though some instruments try to boost simulation environments with generated belongings, the standard and variety stay restricted, falling wanting advanced embodied intelligence analysis wants.
Introducing EmbodiedGen: Open-Supply, Modular, and Simulation-Prepared
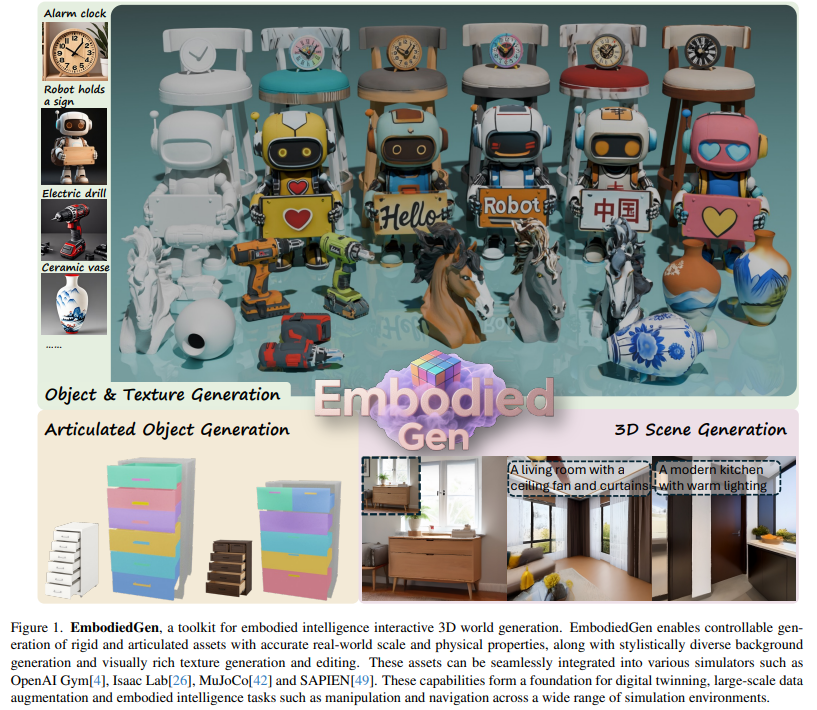
EmbodiedGen is an open-source framework developed collaboratively by researchers from Horizon Robotics, the Chinese language College of Hong Kong, Shanghai Qi Zhi Institute, and Tsinghua College. It’s designed to generate life like, scalable 3D belongings tailor-made for embodied AI duties. The platform outputs bodily correct, watertight 3D objects in URDF format, full with metadata for simulation compatibility. That includes six modular parts, together with image-to-3D, text-to-3D, format technology, and object rearrangement, it allows controllable and environment friendly scene creation. By bridging the hole between conventional 3D graphics and robotics-ready belongings, EmbodiedGen facilitates the scalable and cost-effective growth of interactive environments for embodied intelligence analysis.
Key Options: Multi-Modal Technology for Wealthy 3D Content material
EmbodiedGen is a flexible toolkit designed to generate life like and interactive 3D environments tailor-made for embodied AI duties. It combines a number of technology modules: reworking photos or textual content into detailed 3D objects, creating articulated objects with movable elements, and producing various textures to enhance visible high quality. It additionally helps full scene development by arranging these belongings in a method that respects real-world bodily properties and scale. The output is straight suitable with simulation platforms, making it simpler and extra reasonably priced to construct lifelike digital worlds. This technique helps researchers effectively simulate real-world situations with out counting on costly guide modeling.
Simulation Integration and Actual-World Bodily Accuracy
EmbodiedGen is a strong and accessible platform that allows the technology of various, high-quality 3D belongings tailor-made for analysis in embodied intelligence. It options a number of key modules that permit customers to create belongings from photos or textual content, generate articulated and textured objects, and assemble life like scenes. These belongings are watertight, photorealistic, and bodily correct, making them ultimate for simulation-based coaching and analysis in robotics. The platform helps integration with common simulation environments, together with OpenAI Health club, MuJoCo, Isaac Lab, and SAPIEN, enabling researchers to effectively simulate duties corresponding to navigation, object manipulation, and impediment avoidance at a low price.
RoboSplatter: Excessive-Constancy 3DGS Rendering for Simulation
A notable characteristic is RoboSplatter, which brings superior 3D Gaussian Splatting (3DGS) rendering into bodily simulations. Not like conventional graphics pipelines, RoboSplatter enhances visible constancy whereas lowering computational overhead. Via modules like Texture Technology and Actual-to-Sim conversion, customers can edit the looks of 3D belongings or recreate real-world scenes with excessive realism. Total, EmbodiedGen simplifies the creation of scalable, interactive 3D worlds, bridging the hole between real-world robotics and digital simulation. It’s brazenly obtainable as a user-friendly toolkit to assist broader adoption and continued innovation in embodied AI analysis.
Why This Analysis Issues?
This analysis addresses a core bottleneck in embodied AI: the shortage of scalable, life like, and physics-compatible 3D environments for coaching and analysis. Whereas internet-scale knowledge has pushed progress in imaginative and prescient and language fashions, embodied intelligence calls for simulation-ready belongings with correct scale, geometry, and interactivity—qualities typically lacking in conventional 3D technology pipelines. EmbodiedGen fills this hole by providing an open-source, modular platform able to producing high-quality, controllable 3D objects and scenes suitable with main robotics simulators. Its capacity to transform textual content and pictures into bodily believable 3D environments at scale makes it a foundational software for advancing embodied AI analysis, digital twins, and real-to-sim studying.
Take a look at the Paper and Project Page All credit score for this analysis goes to the researchers of this mission. Additionally, be happy to observe us on Twitter and don’t neglect to affix our 100k+ ML SubReddit and Subscribe to our Newsletter.
FREE REGISTRATION: miniCON AI Infrastructure 2025 (Aug 2, 2025) [Speakers: Jessica Liu, VP Product Management @ Cerebras, Andreas Schick, Director AI @ US FDA, Volkmar Uhlig, VP AI Infrastructure @ IBM, Daniele Stroppa, WW Sr. Partner Solutions Architect @ Amazon, Aditya Gautam, Machine Learning Lead @ Meta, Sercan Arik, Research Manager @ Google Cloud AI, Valentina Pedoia, Senior Director AI/ML @ the Altos Labs, Sandeep Kaipu, Software Engineering Manager @ Broadcom ]
Sana Hassan, a consulting intern at Marktechpost and dual-degree scholar at IIT Madras, is captivated with making use of expertise and AI to handle real-world challenges. With a eager curiosity in fixing sensible issues, he brings a recent perspective to the intersection of AI and real-life options.
