Diffusion fashions are promising in long-horizon planning by producing advanced trajectories by iterative denoising. Nonetheless, their skill to enhance efficiency by extra computation at take a look at time is minimal. Compared to Monte Carlo Tree Search, whose power lies in profiting from further computational sources, typical diffusion-based planners will probably undergo from diminishing returns within the variety of denoising steps or in producing further trajectories. As well as, these fashions have issue with environment friendly exploration-exploitation trade-offs, resulting in suboptimal efficiency in advanced environments. Conventional Monte Carlo Tree Search strategies, whereas giving good iterative enchancment, undergo from excessive computational complexity in massive, steady motion areas. The largest problem is developing a planning paradigm that takes benefit of the generative flexibility of diffusion fashions whereas combining the structured search advantage of Monte Carlo Tree Search, thereby enabling environment friendly and scalable decision-making in long-horizon issues.
State-of-the-art diffusion-based planners, reminiscent of Diffuser, generate full trajectories in a holistic approach, from which ahead dynamics fashions are averted. Despite the fact that this strategy will increase the consistency of trajectories, it lacks structured search strategies, thus not appropriate for enhancing suboptimal plans. Different strategies, reminiscent of Diffuser-Random Search and Monte Carlo Steerage, try and make the most of iterative sampling; nevertheless, they fail to systematically discard unpromising trajectories. Monte Carlo Tree Search, in distinction, leverages extra computational sources, however its reliance on a ahead mannequin renders it unsuitable for in depth, steady motion areas. These limitations create a large hole in scalable and versatile planning, particularly in domains with long-horizon trajectory optimization.
To compensate for these shortcomings, Monte Carlo Tree Diffusion combines tree search with diffusion-based planning, mainly combining the systematic search of Monte Carlo Tree Search with the generative energy of diffusion fashions. As an alternative of treating the denoising course of as a standalone process, the strategy reimagines it in a tree-structured rollout framework, thereby permitting for iterative analysis, pruning, and refinement of partially denoised plans. The framework introduces three key improvements. First, the denoising course of is reimagined as a tree-based growth mechanism that permits for structured looking whereas sustaining trajectory coherence. Second, it applies adaptive exploration-exploitation trade-offs by steerage schedules, which adaptively regulate the refinement of trajectories. Third, as a substitute of utilizing full rollouts, a quick and approximated denoising technique is used to quickly consider trajectory high quality, thereby lowering computational overhead. These enhancements present a scalable and versatile planning mechanism that guarantees to enhance test-time efficiency as computational sources are elevated.
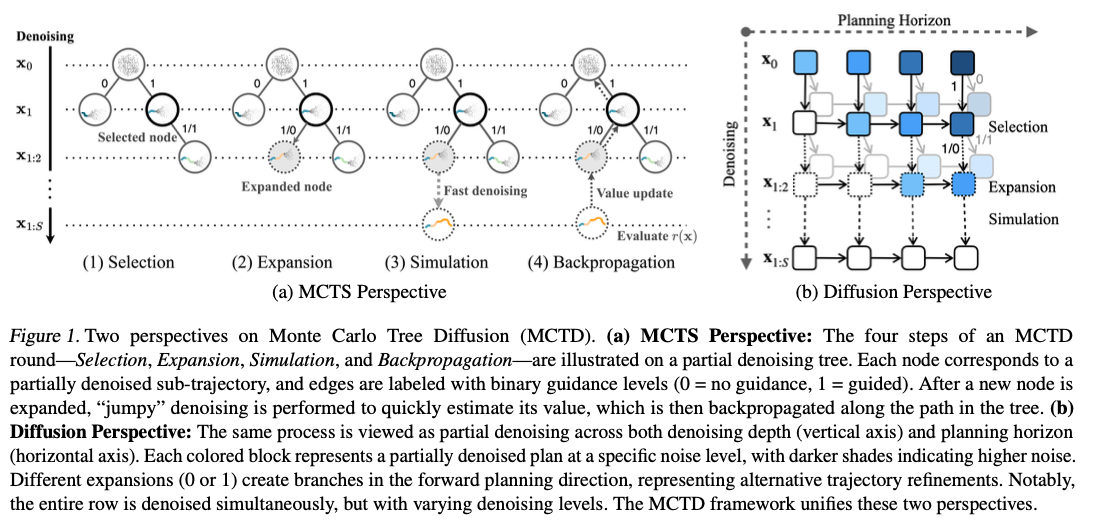
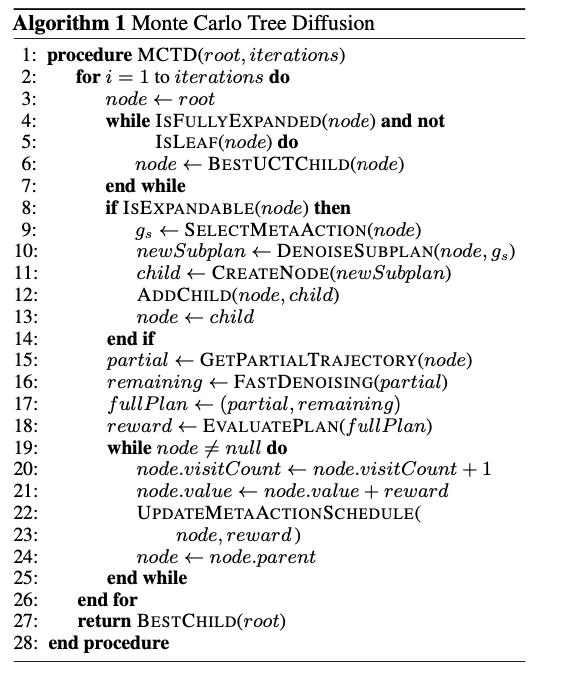
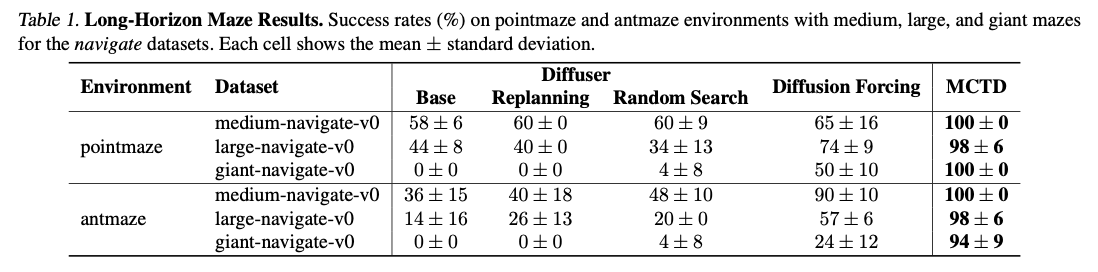
Monte Carlo Tree Diffusion follows the 4 phases of Monte Carlo Tree Search—Choice, Growth, Simulation, and Backpropagation—throughout the diffusion framework. The choice part chooses the optimum subplans in keeping with the Higher Confidence Sure criterion. The growth part generates new subplans with the diffusion mannequin, with each step dynamically balancing exploration by random sampling and exploitation by goal-guided refinement. Simulation is completed with environment friendly jumpy denoising algorithms to guage the standard of trajectories at little computational value. Backpropagation then backpropagates the reward sign from the evaluated trajectories again by the tree, thus updating node values and dynamically adjusting the steerage schedule. The effectivity of this framework is evaluated utilizing the OGBench, an offline goal-conditioned reinforcement studying benchmark involving duties like maze navigation, robotic dice manipulation, and image-based planning. The planning horizons are chosen between 500 and 1000 steps, which permits a complete comparability of its effectivity with baseline fashions like Diffuser, Diffuser-Replanning, and Diffusion Forcing.
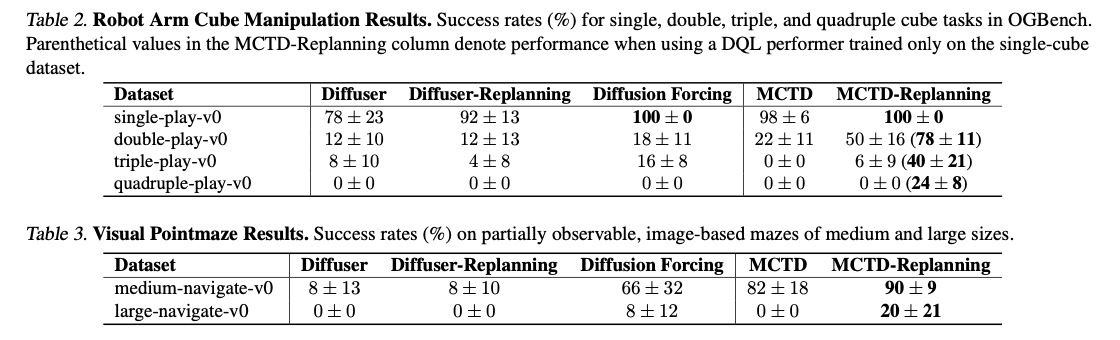
Monte Carlo Tree Diffusion demonstrates state-of-the-art efficiency on a variety of planning duties, outperforming across-the-board diffusion-based and search-based baselines. On long-horizon maze navigation, it reveals near-perfect success charges, far surpassing Diffuser and random search-based approaches, which don’t scale. On robotic dice manipulation, it manages multi-object interactions nicely, stopping trajectory entanglements that make single-pass planners undergo. For image-based navigation beneath partial observability, it preserves excessive success charges, exhibiting its capability to steadiness exploration and exploitation even with out direct state data. Most notably, this strategy scales nicely with further test-time computation, continually refining plans as commonplace diffusion methods plateau, illustrating its energy in structured search in generative fashions.
The mixture of structured search and generative trajectory planning enabled by Monte Carlo Tree Diffusion permits scalable and high-quality decision-making in long-time-frame issues. Tree-based denoising, adaptive steerage schedules, and speeded-up simulation are considerably higher than diffusion-based planners. Its skill to scale simply with extra computational sources makes it a viable candidate to be used in robotics, autonomous decision-making, and strategic planning. Enhancements in adaptive compute allocation, meta-learning for higher search, and self-supervised reward shaping could make it extra scalable and relevant to extra advanced environments.
Check out the Paper. All credit score for this analysis goes to the researchers of this undertaking. Additionally, be happy to observe us on Twitter and don’t neglect to affix our 80k+ ML SubReddit.
🚨 Really useful Learn- LG AI Analysis Releases NEXUS: An Superior System Integrating Agent AI System and Information Compliance Requirements to Tackle Authorized Considerations in AI Datasets
Aswin AK is a consulting intern at MarkTechPost. He’s pursuing his Twin Diploma on the Indian Institute of Expertise, Kharagpur. He’s keen about knowledge science and machine studying, bringing a robust educational background and hands-on expertise in fixing real-life cross-domain challenges.