Pc imaginative and prescient is revolutionizing as a result of growth of basis fashions in object recognition, picture segmentation, and monocular depth estimation, exhibiting sturdy zero- and few-shot efficiency throughout varied downstream duties. Stereo matching, which helps understand depth and create 3D views of scenes, is essential for fields like robotics, self-driving vehicles, and augmented actuality. Nonetheless, the exploration of basis fashions in stereo matching stays restricted as a result of problem of acquiring correct disparity floor reality (GT) information. Many stereo datasets exist, however utilizing them successfully for coaching is tough. Furthermore, these annotated datasets can’t prepare a perfect basis mannequin even when mixed.
Presently, Stereo-from-mono is a number one examine specializing in creating stereo-image pairs and disparity maps straight from single photographs to handle these challenges. Nonetheless, this method resulted in solely 500,000 information samples, which is comparatively low in comparison with the dimensions required to coach sturdy basis fashions successfully. Whereas this effort represents an essential step in the direction of decreasing the dependency on costly stereo information assortment, the generated dataset continues to be inadequate for constructing large-scale fashions able to generalizing properly to various real-world situations. Early Stereo-matching strategies primarily relied on hand-crafted options however shifted to CNN-based mostly fashions like GCNet and PSMNet, bettering accuracy with strategies like 3D price aggregation. Video stereo matching makes use of temporal information for consistency however struggles with generalization. Cross-domain strategies handle this by studying domain-invariant options utilizing strategies like unsupervised adaptation and contrastive studying, as seen in fashions like RAFT–Stereo and FormerStereo.
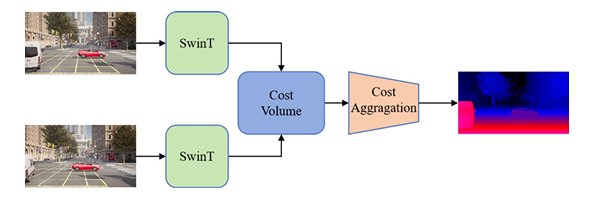
A gaggle of researchers from Faculty of Pc Science, Wuhan College, Institute of Synthetic Intelligence and Robotics, Xi’an Jiaotong College, Waytous, College of Bologna, Rock Universe, Institute of Automation, Chinese language Academy of Sciences and College of California, Berkeley carried out detailed analysis to beat these points and proposed StereoAnything, a foundational mannequin for stereo matching developed to supply high-quality disparity estimates for any pair of matching stereo photographs, regardless of how advanced the scene or difficult the environmental situations. It’s designed to coach a strong stereo community utilizing large-scale blended information. It primarily consists of 4 parts: function extraction, price building, price aggregation, and disparity regression.
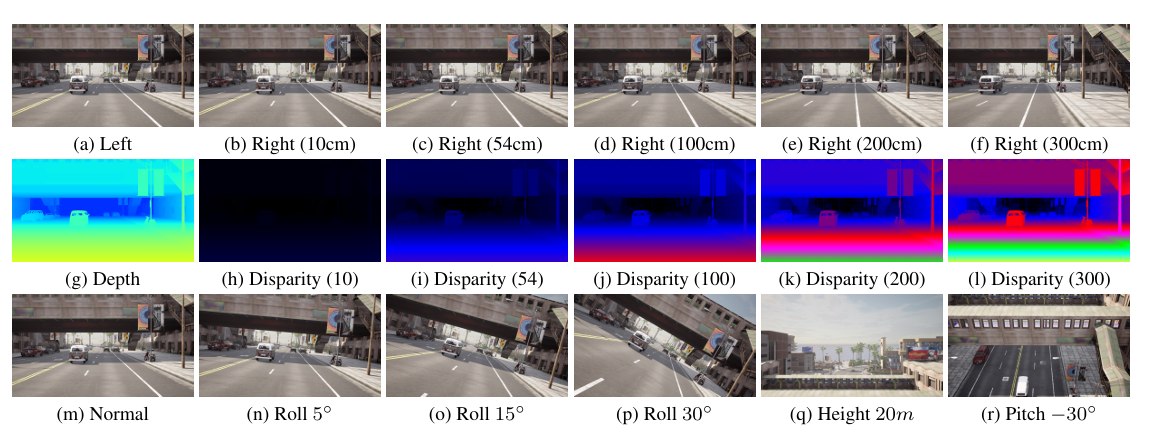
To enhance generalization, Supervised stereo information was used with out depth normalization, as stereo matching depends on scale info. The coaching started with a single dataset and mixed top-ranked datasets to enhance robustness. For single-image studying, monocular depth fashions predicted depth transformed into disparity maps to generate practical stereo pairs by way of ahead warping. Occlusions and gaps have been stuffed utilizing textures from different photographs within the dataset.
The experiment confirmed the analysis of the StereoAnything framework utilizing OpenStereo and NMRF-Stereo baselines with Swin Transformer for function extraction. Coaching used AdamW optimizer, OneCycleLR scheduling, and fine-tuning on labeled, blended, and pseudo-labeled datasets with information augmentation. Testing on KITTI, Middlebury, ETH3D, and DrivingStereo confirmed StereoAnything considerably diminished errors, with NMRF-Stereo-SwinT reducing the imply error from 18.11 to five.01. Positive-tuning StereoCarla on extra various datasets result in one of the best imply metric of 8.52%. This confirmed the significance of dataset variety when regarding stereo-matching efficiency.
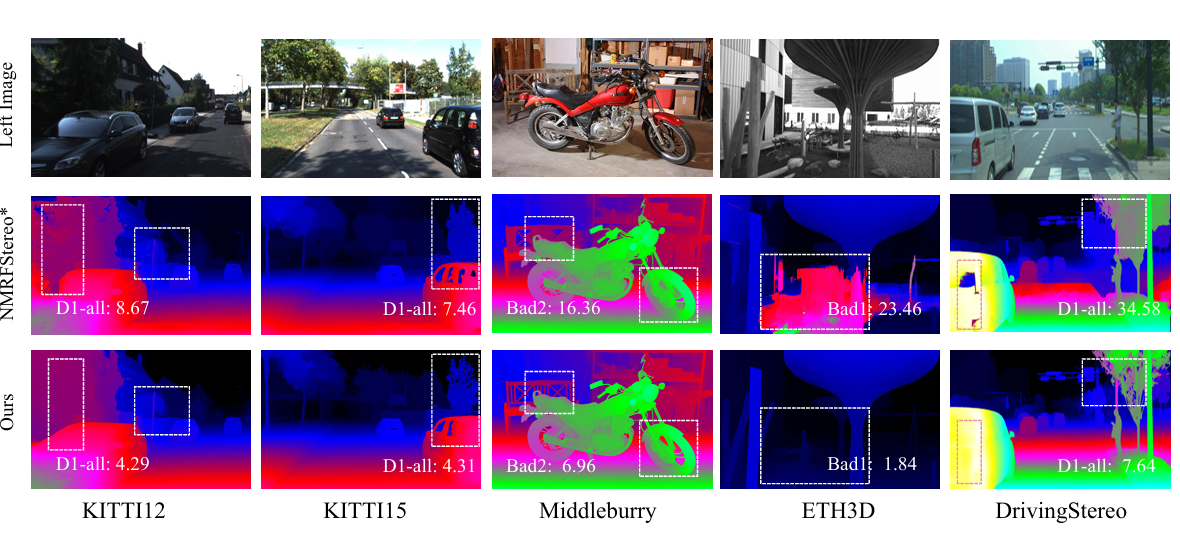
When it comes to outcomes, the StereoAnything confirmed sturdy robustness throughout varied domains in each indoor and outside scenes. This method continually delivered a disparity map that was extra correct than with the NMRF-Stereo-SwinTmode. Thus, this method reveals sturdy generalization capabilities and performs higher throughout domains with quite a few visible and environmental variations.
It’s protected to conclude that StereoAnything supplied a extremely helpful answer for sturdy stereo matching. A brand new synthetic dataset referred to as StereoCarla is used to higher generalize throughout totally different situations and improve efficiency. Additionally, the effectiveness of labeled stereo datasets and pseudo stereo datasets generated utilizing monocular depth estimation fashions was investigated. When it comes to efficiency, StereoAnything achieved aggressive efficiency throughout varied benchmarks and real-world situations. These outcomes present the potential of hybrid coaching methods, together with various information sources to boost stereo mannequin robustness, and can be utilized because the baseline for future enchancment and analysis!
Try the Paper and GitHub. All credit score for this analysis goes to the researchers of this venture. Additionally, don’t neglect to comply with us on Twitter and be part of our Telegram Channel and LinkedIn Group. In case you like our work, you’ll love our newsletter.. Don’t Overlook to hitch our 55k+ ML SubReddit.
Divyesh is a consulting intern at Marktechpost. He’s pursuing a BTech in Agricultural and Meals Engineering from the Indian Institute of Know-how, Kharagpur. He’s a Knowledge Science and Machine studying fanatic who desires to combine these main applied sciences into the agricultural area and resolve challenges.